
ExperimentalRaumfahrt-
InteressenGemeinschaft e.V.
Eine Initiative an der Technischen Universität Braunschweig




Experimentalrakete Phoebe Mk 2b vor dem Start

ORTHOS bei der European Rover Challenge

Mitglieder von MARTINI vor dem Raketenstart


Mitglieder des Rover-Teams, sowie der Initiativen AKAMAV und TUC Drillbotics® beim „Rover Träff 2026“ in der Schweiz

Die Teams und Mitwirkenden von REXUS 35/36


Höhenforschungsrakete REXUS 31 vor dem Start


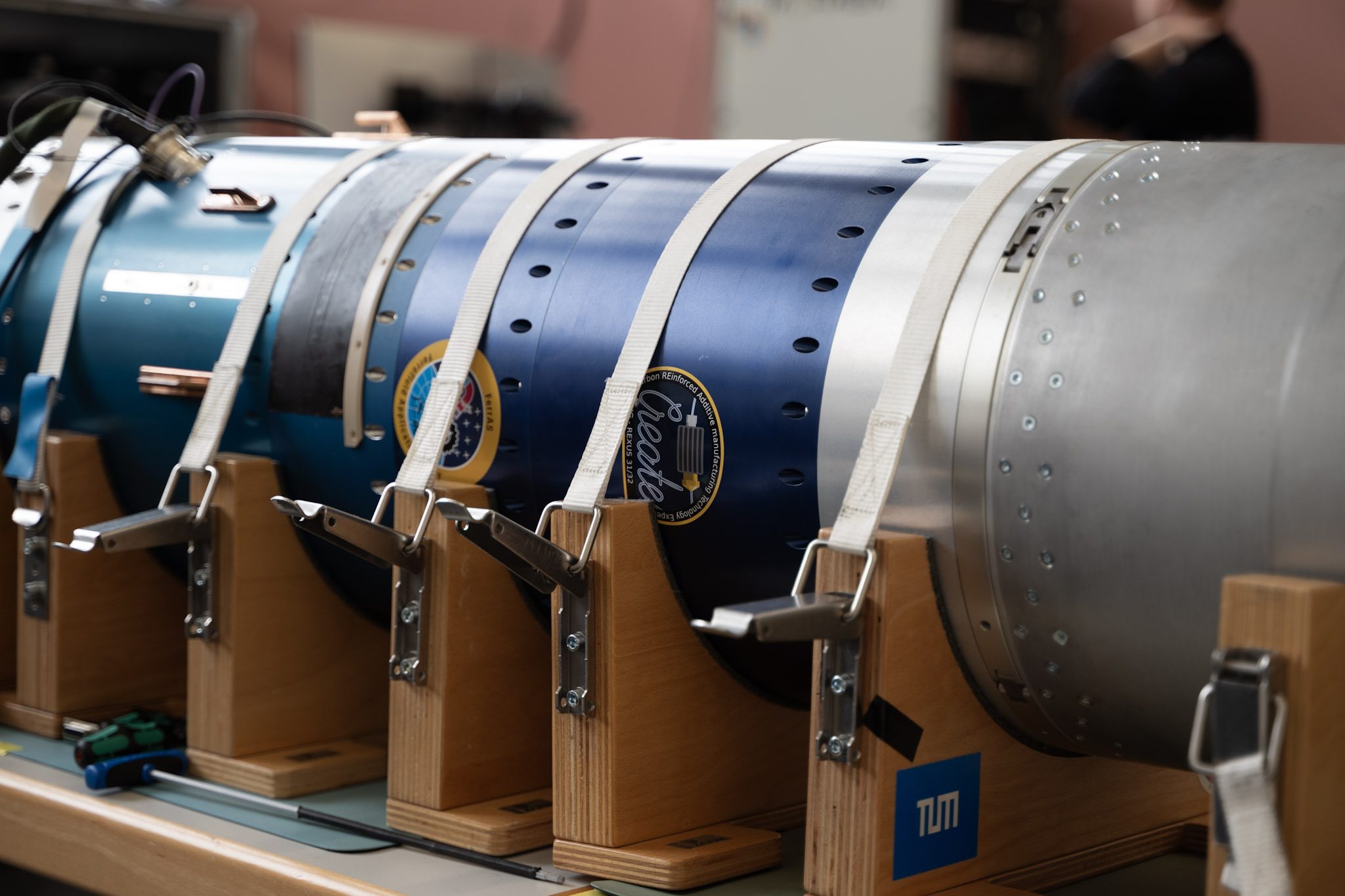
CREATE bei Tests in Oberpfaffenhofen

Polarlichter in Kiruna, Nordschweden

Über den Wolken im Wetterballon
Unsere Arbeitsgruppen
Experimentalraketen
Die AG Experimentalraketen befasst sich mit der Entwicklung und Umsetzung von Projekten rund um den Betrieb von Experimentalraketen.
Themen und Schwerpunkte:
- Struktur (Maschinenbau, Raumfahrttechnik)
- Antriebe (Maschinenbau, Raumfahrttechnik)
- Avionik (Elektrotechnik, Informatik, Informations-Systemtechnik)
- Payload (Raumfahrttechnik, Physik, Biologie, …)
Höhenforschung
Die AG Höhenforschung befasst sich mit sämtlichen Projekten rund um Forschung in der oberen Atmosphäre, im Weltall und auf anderen Planeten.
Themen und Schwerpunkte:
- Struktur (Maschinenbau, Raumfahrttechnik)
- Robotik (Robotik, Maschinenbau, Informatik, Informations-Systemtechnik)
- Satellitentechnik (Raumfahrttechnik)
- Experimentdesign (Physik, Biologie, …)
Presse und Öffentlichkeitsarbeit
Die AG Presse und Öffentlichkeitsarbeit kommuniziert die Vorhaben und Erfolge der ERIG mit der Öffentlichkeit.
Sie erfüllt zudem unseren Bildungsauftrag, indem sie an der Organisation von Workshops beteiligt ist.
Themen:
- Social Media Management
- Verwaltung
- Finanzen und Sponsorings
- Eventplanung
Unsere Projekte

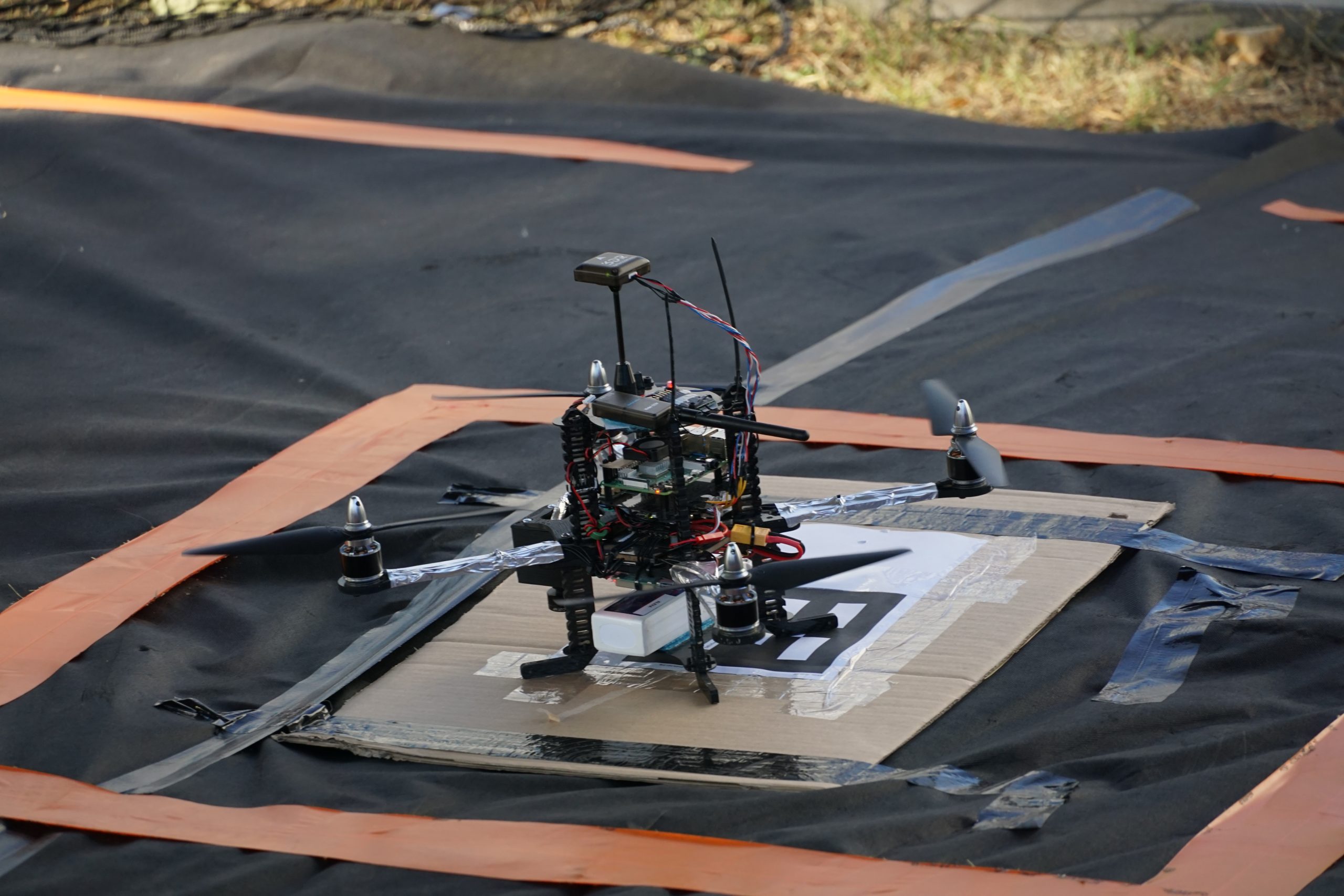

SG Rover
Projekt KERBEROS
KERBEROS ist unser aktueller Mars-Rover-Demonstrator. Mit ihm treten wir auf der jährlich stattfindenden European Rover Challenge an, in der wir uns in verschiedenen Disziplinen mit Teams aus aller Welt messen.
AG Experimentalraketen
Projekt UNITY
Im Projekt UNITY (Universal Iterative Hybrid Rocket)entwickeln wir die Hybridrakete Hyperion sowie die Feststoffrakete Phoebe mit einer austauschbaren Payload und einem zweistufigen Fallschirmsystem.






SG Antriebe

Projekt HYDRA
Im Projekt HYDRA (HybridDemonstrations-RaketenAntrieb) entwickeln wir seit 2001 eine Reihe an Hybridtriebwerken für den Flug auf unseren Raketen und für wissenschaftliche und technische Forschung.
SG Höhenforschung im erdnahen Raum

Projekt MARTINI
Ziel unseres REXUS-Projekts MARTINI (Material Analysis of Resin Testing in Null-Gravity Interactions) ist die Untersuchung des Einflusses der Gravitationskraft auf den Mischprozess von Resinen.
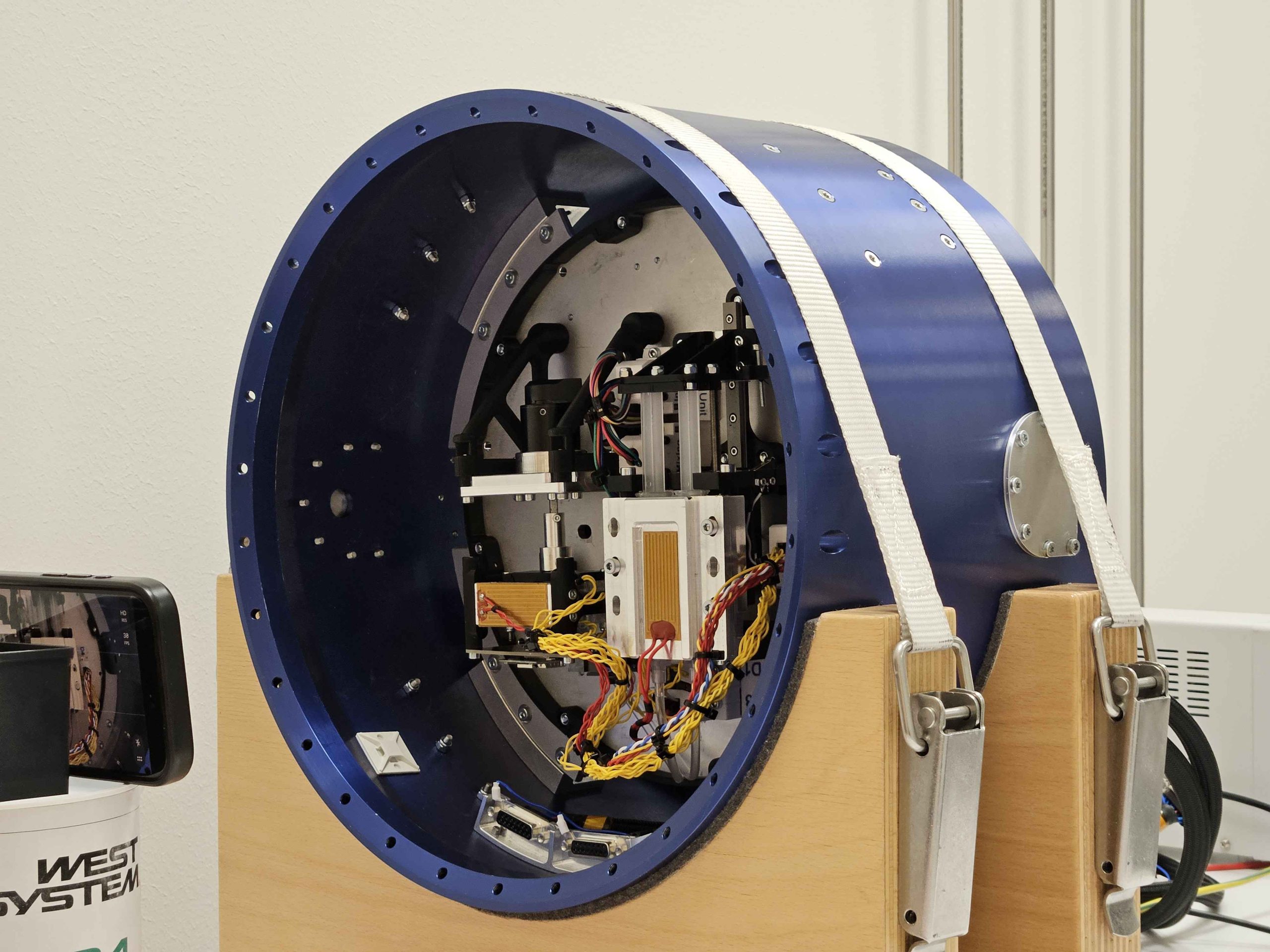


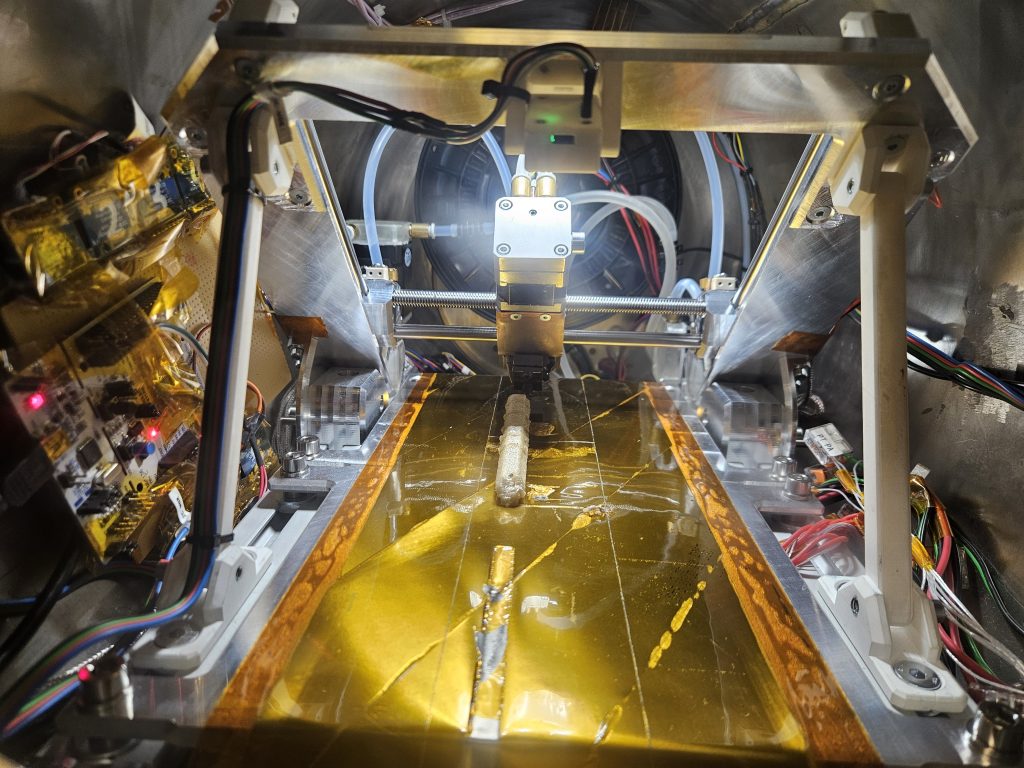
SG Kleinsatelliten
Projekt iLOOP
Im Forschungsprojekt iLOOP (infinite Length On-Orbit Printing) entwickeln wir einen Demonstrator für eine Kleinsatelliten-Nutzlast. Ziel ist die additive Fertigung von langen Strukturen aus dem Hochleistungsthermoplast PEEK im Erdorbit.
Mitmachen
Interesse? Dann komm vorbei!
Du hast Lust, mit uns an spannenden Projekten aus der Raumfahrt zu arbeiten und dich dabei fachlich und persönlich weiter zu entwickeln? Dann tritt mit uns in Kontakt! Egal, ob du Vorkenntnisse hast oder nicht.
Jeden Dienstag um 18 Uhr findet unser vereinsweites Arbeitstreffen statt. Wenn du hereinschnuppern möchtest, ist das der perfekte Zeitpunkt, unsere Mitglieder und Projekte kennenzulernen!

Anfahrt
So erreichst du uns!
Unsere Räumlichkeiten befinden sich am Forschungsflughafen Braunschweig im Keller des Instituts für Raumfahrtsysteme der TU Braunschweig in der Hermann-Blenk-Straße 23. Mit dem Bus erreichst du uns mit den Linien 413 und 436 (Haltestelle Luftfahrtbundesamt oder Flugunfalluntersuchungsstelle).
Mitglied im

© 2026 ERIG e.V. · Powered by WordPress and Ollie